

2023-07-12
2. एबीबी रोबोट पावर मॉड्यूल शॉर्ट सर्किट बोर्ड के शॉर्ट सर्किट दोष को संभालना
मानवीय कारक: हॉट स्वैपिंग हार्डवेयर बहुत खतरनाक है, और कई सर्किट बोर्ड विफलताएं हॉट स्वैपिंग के कारण होती हैं।पावर के साथ कार्ड और प्लग लगाते समय बल का अनुचित उपयोग इंटरफेस, चिप्स आदि को नुकसान पहुंचा सकता है, जिससे रोबोट सर्किट बोर्ड को नुकसान हो सकता है;जैसे-जैसे रोबोट का उपयोग करने का समय बढ़ता है, रोबोट सर्किट बोर्ड के घटक स्वाभाविक रूप से पुराने हो जाएंगे, जिससे रोबोट सर्किट बोर्ड विफल हो जाएगा।
पर्यावरणीय कारक: ऑपरेटर द्वारा अनुचित रखरखाव के कारण, रोबोट सर्किट बोर्ड धूल से ढका हुआ है, जिससे सिग्नल शॉर्ट सर्किट हो सकता है।
3. औद्योगिक रोबोटों का बैकअप लेना कब आवश्यक है?
नई मशीन को पहली बार चालू करने के बाद।
कोई भी संशोधन करने से पहले.
3. संशोधन पूरा करने के बाद.
4. यदि औद्योगिक रोबोट महत्वपूर्ण हैं, तो उन्हें नियमित आधार पर सप्ताह में एक बार किया जाना चाहिए।
5. यूएसबी ड्राइव पर भी बैकअप बनाना सबसे अच्छा है।
6. हार्ड ड्राइव में जगह खाली करने के लिए नियमित रूप से पुराने बैकअप हटाएं।
4. उस स्थिति को कैसे संभालें जहां रोबोट चालू है और शिक्षण पेंडेंट निम्नलिखित इंटरफ़ेस प्रदर्शित करता रहता है
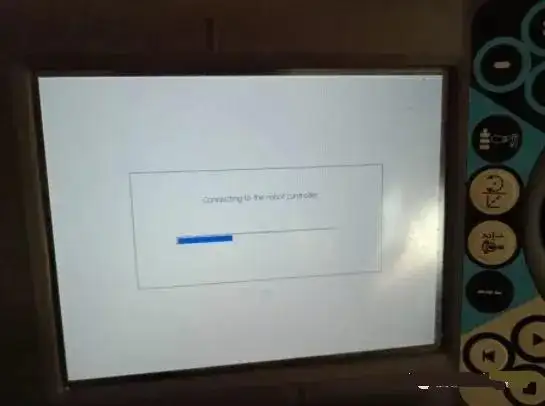 उपरोक्त स्थिति यह है कि शिक्षण पेंडेंट और रोबोट के मुख्य नियंत्रक के बीच कोई संचार कनेक्शन स्थापित नहीं है, और कनेक्शन स्थापित न करने के कारणों में शामिल हैं:
उपरोक्त स्थिति यह है कि शिक्षण पेंडेंट और रोबोट के मुख्य नियंत्रक के बीच कोई संचार कनेक्शन स्थापित नहीं है, और कनेक्शन स्थापित न करने के कारणों में शामिल हैं:
1. रोबोट होस्ट दोषपूर्ण है।
2. रोबोट होस्ट का अंतर्निर्मित सीएफ कार्ड (एसडी कार्ड) दोषपूर्ण है।
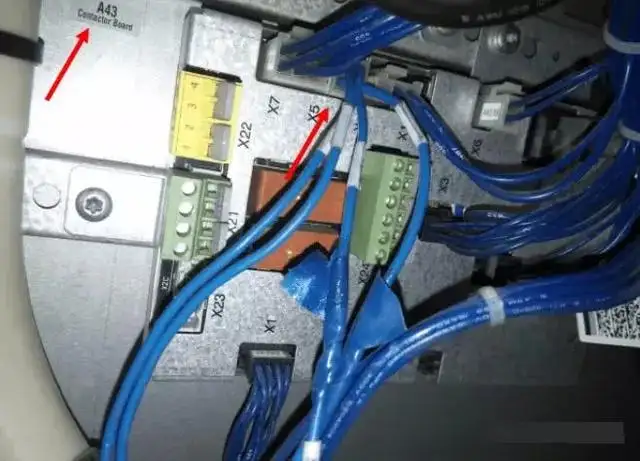
3. शिक्षण पेंडेंट और होस्ट के बीच नेटवर्क केबल ढीला है, आदि।
प्रसंस्करण विधि: 1. जांचें कि क्या होस्ट सामान्य है और क्या होस्ट में एसडी कार्ड सामान्य है।
2. जांचें कि शिक्षण पेंडेंट से होस्ट तक नेटवर्क केबल ठीक से जुड़ा हुआ है या नहीं।
5. जब रोबोट अलार्म संदेश प्रदर्शित करता है तो 10106 रखरखाव समय अनुस्मारक का क्या अर्थ है?
यह स्थिति एक एबीबी रोबोट बुद्धिमान आवधिक रखरखाव अनुस्मारक है।
6. जब रोबोट पावर ऑन स्थिति में प्रवेश करता है तो सिस्टम की खराबी को कैसे संभालें?
1. रोबोट को एक बार पुनरारंभ करें।
यदि नहीं, तो अधिक विस्तृत अलार्म संकेतों के लिए शिक्षण पेंडेंट की जाँच करें और कार्रवाई करें।
3. पुनः प्रारंभ करें.
4. यदि यह अभी भी जारी नहीं किया जा सकता है, तो बी स्टार्टअप का प्रयास करें।
5. यदि यह अभी भी काम नहीं करता है, तो कृपया पी स्टार्टअप का प्रयास करें।
6. यदि यह अभी भी काम नहीं करता है, तो कृपया I स्टार्टअप का प्रयास करें (यह रोबोट को उसकी फ़ैक्टरी सेटिंग्स पर वापस कर देगा, सावधान रहें)।
7. क्या रोबोट बैकअप को कई रोबोट द्वारा साझा किया जा सकता है?
नहीं, उदाहरण के लिए, रोबोट ए का बैकअप केवल रोबोट ए के लिए उपयोग किया जा सकता है, रोबोट बी या सी के लिए नहीं, क्योंकि इससे सिस्टम विफलता हो सकती है।
8. रोबोट बैकअप में कौन सी फ़ाइलें साझा की जा सकती हैं?
यदि दो रोबोट एक ही मॉडल और कॉन्फ़िगरेशन के हैं।आप RAPID प्रोग्राम और EIO फ़ाइल साझा कर सकते हैं, लेकिन साझा करने के बाद इसे सामान्य रूप से उपयोग करने से पहले सत्यापित भी करना होगा।
9. रोबोट की यांत्रिक उत्पत्ति क्या है?यांत्रिक उत्पत्ति कहाँ है?
रोबोट के छह सर्वो मोटर्स में से प्रत्येक की एक अद्वितीय निश्चित यांत्रिक उत्पत्ति होती है।रोबोट की यांत्रिक उत्पत्ति की गलत सेटिंग से रोबोट की सीमित या गलत गति, सीधी रेखा में चलने में असमर्थता और रोबोट को गंभीर क्षति जैसी समस्याएं पैदा होंगी।
10. रोबोट 50204 के एक्शन मॉनिटरिंग अलार्म को कैसे साफ़ करें?
1. वास्तविक स्थिति से मेल खाने के लिए रोबोट एक्शन मॉनिटरिंग पैरामीटर्स (कंट्रोल पैनल एक्शन मॉनिटरिंग मेनू में) को संशोधित करें।
2. रोबोट के त्वरण को कम करने के लिए AccSet कमांड का उपयोग करें।
3. गति डेटा में v कम करें_ सड़ांध विकल्प।
11. जब रोबोट पहली बार चालू होता है तो अलार्म "50296, एसएमबी मेमोरी डेटा अंतर" को कैसे संभालें?
1. एबीबी मुख्य मेनू से कैलिब्रेशन का चयन करें।
2. ROB_ पर क्लिक करें 1. कैलिब्रेशन स्क्रीन दर्ज करें और SMB मेमोरी चुनें।
3. "उन्नत" चुनें, दर्ज करें और "क्लियर कंट्रोल कैबिनेट मेमोरी" पर क्लिक करें।
4. पूरा करने के बाद, "बंद करें" पर क्लिक करें और फिर "अपडेट" पर क्लिक करें।
5. 'स्वैप्ड कंट्रोल कैबिनेट या रोबोटिक आर्म, एसएमबी मेमोरी डेटा के साथ कंट्रोल कैबिनेट को अपडेट करना' चुनें।
12. RAPID प्रोग्राम में रोबोट प्रक्षेपवक्र गति की गति को कैसे अनुकूलित करें?
1. शिक्षण पेंडेंट के मुख्य मेनू से प्रोग्राम डेटा का चयन करें।
2. डेटा टाइप स्पीडडेटा ढूंढने के बाद न्यू पर क्लिक करें।
3. प्रारंभिक मूल्य पर क्लिक करें, और चार चर स्पीडडेटा के अर्थ हैं: v_ TCP रोबोट की रैखिक चलने की गति का प्रतिनिधित्व करता है, v_ Rot रोबोट की घूर्णी गति का प्रतिनिधित्व करता है, v_ Leax बाहरी अक्ष की रैखिक ऑपरेटिंग गति का प्रतिनिधित्व करता है , v_ Reax बाहरी अक्ष की घूर्णन गति का प्रतिनिधित्व करता है।यदि कोई बाहरी अक्ष नहीं है, तो अंतिम दो को संशोधित करने की आवश्यकता नहीं है।
4. अनुकूलित डेटा को RAPID प्रोग्राम में कॉल किया जा सकता है।
13. एबीबी रोबोट सर्वो मोटर मरम्मत में 6 सामान्य दोषों का निवारण
1. हाई-स्पीड रोटेशन के दौरान मोटर एरर काउंटर ओवरफ्लो एरर को कैसे संभालें?
हाई-स्पीड रोटेशन के दौरान मोटर एरर काउंटर ओवरफ्लो फॉल्ट होता है।
प्रतिउपाय 1: जांचें कि क्या मोटर पावर केबल और एनकोडर केबल की वायरिंग सही है और क्या केबल क्षतिग्रस्त है।
लंबी कमांड पल्स इनपुट करते समय मोटर त्रुटि काउंटर ओवरफ़्लो दोष उत्पन्न होता है।
संचालन के दौरान मोटर त्रुटि काउंटर ओवरफ़्लो दोष उत्पन्न हुआ।
प्रतिउपाय 2: त्रुटि काउंटर का अतिप्रवाह स्तर सेटिंग मान बढ़ाएँ;घूर्णन गति को धीमा करें;त्वरण और मंदी का समय बढ़ाएँ;भार बहुत भारी है, और शुरुआत से ही बड़ी क्षमता वाली मोटर का चयन करना या भार कम करना आवश्यक है, और भार बढ़ाने के लिए ट्रांसमिशन संगठनों जैसे रेड्यूसर को स्थापित करना आवश्यक है।
2. यदि पल्स आउटपुट होने पर यह काम न करे तो क्या करना चाहिए?
नियंत्रक के पल्स आउटपुट के वर्तमान मूल्य का पर्यवेक्षण करें और क्या पल्स आउटपुट लाइट चमक रही है, स्वीकार करें कि कमांड पल्स पूरा हो गया है और अब सामान्य रूप से आउटपुट हो रहा है;
जांचें कि क्या नियंत्रक से ड्राइवर तक नियंत्रण केबल, पावर केबल और एनकोडर केबल गलत तरीके से वायर्ड हैं, क्षतिग्रस्त हैं, या खराब संपर्क में हैं;
जांचें कि ब्रेक के साथ सर्वो मोटर का ब्रेक अब खुल गया है या नहीं;
पर्यवेक्षण करें कि सर्वो ड्राइवर का पैनल पल्स कमांड के इनपुट को स्वीकार करता है या नहीं;
रन ऑपरेशन कमांड सामान्य है;
नियंत्रण प्रपत्र को दिशात्मक नियंत्रण प्रपत्र चुनना होगा;
क्या सर्वो ड्राइवर द्वारा निर्धारित इनपुट पल्स प्रकार कमांड पल्स की सेटिंग के अनुरूप है;
सुनिश्चित करें कि सकारात्मक रोटेशन साइड ड्राइव बंद हो गया है, रोटेशन साइड ड्राइव स्टॉप सिग्नल, और त्रुटि काउंटर रीसेट सिग्नल इनपुट नहीं किया गया है, लोड डिस्कनेक्ट हो गया है, और नो-लोड ऑपरेशन सामान्य है।यांत्रिक प्रणाली की जाँच करें.
3. यदि लोड के साथ ओवरलोड रिपोर्ट न हो तो मुझे क्या करना चाहिए?
यदि ऐसा तब होता है जब सर्वो रन सिग्नल जुड़ा होता है और कोई पल्स उत्सर्जित नहीं होता है:
यह देखने के लिए कि कहीं कोई ख़राब संपर्क या केबल क्षति तो नहीं है, सर्वो मोटर की पावर केबल वायरिंग की जाँच करें;यदि यह ब्रेक वाली सर्वो मोटर है, तो ब्रेक चालू होना चाहिए;क्या स्पीड लूप का लाभ बहुत अधिक है;क्या स्पीड लूप सेट का अभिन्न समय स्थिरांक बहुत छोटा है।
यदि सर्वो केवल ऑपरेशन के दौरान ख़राब होता है:
क्या अज़ीमुथ सर्किट का लाभ बहुत अधिक है;क्या पोजिशनिंग पूर्णता का आयाम बहुत छोटा है;जांचें कि सर्वो मोटर शाफ्ट पर कोई लॉक रोटर तो नहीं है और मशीनरी को शुरुआत से ही समायोजित करें।
4. ऑपरेशन के दौरान असामान्य आवाज़ या कंपन से कैसे निपटें?
सर्वो वायरिंग:
क्षति की जांच के लिए मानकीकृत बिजली केबल, एनकोडर केबल, नियंत्रण केबल और केबल का उपयोग करें;जांचें कि क्या नियंत्रण रेखा के पास हस्तक्षेप स्रोत हैं, और क्या वे पास के उच्च वर्तमान बिजली केबलों के समानांतर या बहुत करीब हैं;उत्कृष्ट ग्राउंडिंग सुनिश्चित करने के लिए जांचें कि क्या ग्राउंडिंग टर्मिनल की क्षमता में कोई बदलाव है।
सर्वो पैरामीटर:
सर्वो गेन सेटिंग बहुत बड़ी है, और शुरुआत से ही सर्वो मापदंडों को मैन्युअल रूप से या सक्रिय रूप से समायोजित करने की अनुशंसा की जाती है;गति प्रतिक्रिया फ़िल्टर के समय स्थिरांक की सेटिंग को स्वीकार करते हुए, 0 के प्रारंभिक मान के साथ, परीक्षण द्वारा निर्धारित मान को बढ़ाना संभव है;इलेक्ट्रॉनिक गियर अनुपात सेटिंग बहुत बड़ी है, जो फ़ैक्टरी सेटिंग्स पर पुनर्स्थापित करने की वकालत कर रही है;सर्वो सिस्टम और मैकेनिकल सिस्टम के बीच अनुनाद, नॉच फिल्टर आवृत्ति और आयाम का परीक्षण और समायोजन।
यांत्रिक प्रणाली:
मोटर शाफ्ट और उपकरण प्रणाली को जोड़ने वाला युग्मन भटक गया, और स्थापना पेंच कड़े नहीं हुए;पुली या गियर के खराब जुड़ाव से भी लोड टॉर्क में बदलाव हो सकता है।नो-लोड ऑपरेशन का परीक्षण करें.यदि नो-लोड ऑपरेशन सामान्य है, तो जांचें कि क्या यांत्रिक प्रणाली के बॉन्डिंग भाग में कोई असामान्यता है;स्वीकार करें कि क्या लोड जड़ता, टॉर्क और गति बहुत बड़ी है, नो-लोड ऑपरेशन का परीक्षण करें, और यदि नो-लोड ऑपरेशन सामान्य है, तो लोड कम करें या ड्राइवर और मोटर को बड़ी क्षमता से बदलें।
5. एबीबी रोबोट सर्वो मोटर मरम्मत के दौरान गलत ओरिएंटेशन नियंत्रण और स्थिति को कैसे संभालें?
सबसे पहले, स्वीकार करें कि क्या नियंत्रक का वास्तविक घोषित पल्स मान अपेक्षित मूल्य के अनुरूप है, और यदि नहीं, तो प्रोग्राम की जांच करें और सही करें;
पर्यवेक्षण करें कि सर्वो ड्राइवर द्वारा प्राप्त पल्स कमांड की संख्या नियंत्रक द्वारा घोषित पल्स कमांड से मेल खाती है या नहीं।यदि नहीं, तो नियंत्रण केबल की जाँच करें;जांचें कि क्या सर्वो कमांड पल्स फॉर्म की सेटिंग नियंत्रक सेटिंग, जैसे सीडब्ल्यू/सीसीडब्ल्यू या पल्स+दिशा के अनुरूप है;
सर्वो गेन सेटिंग बहुत बड़ी है, कृपया स्क्रैच से सर्वो गेन को मैन्युअल रूप से या सक्रिय रूप से समायोजित करें;प्रत्यागामी गति के दौरान सर्वो मोटर में त्रुटियाँ उत्पन्न होने का खतरा रहता है।प्रक्रिया द्वारा अनुमत शर्तों के तहत एक यांत्रिक मूल संकेत सेट करने और त्रुटि अनुमत पैमाने से अधिक होने से पहले मूल खोज ऑपरेशन करने की अनुशंसा की जाती है;यांत्रिक प्रणाली में स्वयं कम सटीकता या असामान्य संचरण संगठन होता है (जैसे कि सर्वो मोटर और उपकरण प्रणाली के बीच युग्मन का विचलन)।
6. एबीबी रोबोट सर्वो मोटर मरम्मत, दिशात्मक नियंत्रण संचालन, ओवरस्पीड दोष की सूचना दी गई।इसे कैसे संभालें?
जैसे ही सर्वो रन सिग्नल कनेक्ट होगा, यह ट्रिगर हो जाएगा: जांचें कि सर्वो मोटर पावर केबल और एनकोडर केबल की वायरिंग सही है और क्षतिग्रस्त नहीं है।
14. एबीबी औद्योगिक रोबोट नियमित रखरखाव कैसे करते हैं?
"ब्रेक निरीक्षण" के सामान्य संचालन से पहले, प्रत्येक अक्ष के मोटर ब्रेक की जांच करना आवश्यक है।मोटर ब्रेक की निरीक्षण विधि इस प्रकार है:
1. प्रत्येक रोबोटिक भुजा की धुरी को उसकी अधिकतम भार स्थिति तक चलाएँ।
2. रोबोट नियंत्रक पर मोटर मोड चयन स्विच को मोटर बंद स्थिति में बदलें।
3. जांचें कि शाफ्ट अपनी मूल स्थिति में है या नहीं।यदि मोटर बंद होने के बाद भी यांत्रिक भुजा अपनी स्थिति बनाए रखती है, तो यह इंगित करता है कि ब्रेक अच्छी स्थिति में है।
मंदी ऑपरेशन (250 मिमी/सेकेंड) फ़ंक्शन खोने का खतरा
कंप्यूटर या शिक्षण पेंडेंट से गियर अनुपात या अन्य गति मापदंडों को न बदलें।यह मंदी ऑपरेशन (250 मिमी/सेकेंड) फ़ंक्शन को प्रभावित करेगा।
15. शिक्षण सामग्री का सुरक्षित रूप से उपयोग करते समय ध्यान देने योग्य कई बातें:
शिक्षण पेंडेंट पर स्थापित सक्षम डिवाइस बटन, जब आधा दबाया जाता है, तो सिस्टम को मोटर्स ऑन मोड में बदल देता है।जब बटन छोड़ा जाता है या पूरी तरह से दबाया जाता है, तो सिस्टम मोटर्स ऑफ मोड में बदल जाता है।
16. शिक्षण सहायक सामग्री का सुरक्षित रूप से उपयोग करने के लिए निम्नलिखित सिद्धांतों का पालन किया जाना चाहिए:
1. जब प्रोग्रामिंग या डिबगिंग के दौरान सक्षम डिवाइस बटन अपना कार्य नहीं खो सकता है, और रोबोट को स्थानांतरित करने की आवश्यकता नहीं है, तो तुरंत सक्षम डिवाइस बटन को छोड़ दें।
2. जब प्रोग्रामिंग कर्मी किसी सुरक्षित क्षेत्र में प्रवेश करते हैं, तो दूसरों को रोबोट को हिलाने से रोकने के लिए उन्हें हमेशा अपने शरीर पर शिक्षण पेंडेंट रखना चाहिए।
17. रोबोटिक भुजा की कार्य सीमा के भीतर काम करते समय, निम्नलिखित बातों का ध्यान रखना चाहिए:
1. कंप्यूटर को डिस्कनेक्ट करने या दूर से संचालित करने के लिए सक्षम डिवाइस को संचालित करने के लिए नियंत्रक पर मोड चयन स्विच को मैन्युअल स्थिति में चालू किया जाना चाहिए;
2. जब मोड चयन स्विच चालू हो
3. रोबोटिक भुजा के घूर्णन अक्ष पर ध्यान दें, बाल या कपड़े मिश्रित होने पर सावधान रहें।इसके अलावा, रोबोटिक भुजा पर अन्य चयनित घटकों या उपकरणों पर भी ध्यान दें;
4. प्रत्येक अक्ष के मोटर ब्रेक की जाँच करें।
18. स्पर्श विचलन
घटना 1: अंगुलियों द्वारा छुई गई स्थिति माउस तीर से मेल नहीं खाती।
कारण: ड्राइवर प्रोग्राम स्थापित करने के बाद, शिक्षण पेंडेंट ने अंशांकन के दौरान बैल की आंख की स्थिति के केंद्र को लंबवत रूप से नहीं छुआ।
समाधान: स्थिति को पुन: कैलिब्रेट करें।
घटना 2: कुछ क्षेत्रों में सटीक स्पर्श होता है, जबकि अन्य में स्पर्श में विचलन होता है।
कारण: सतह ध्वनिक तरंग टच स्क्रीन के चारों ओर ध्वनिक प्रतिबिंब धारियों पर बड़ी मात्रा में धूल या स्केल जमा हो जाता है, जो ध्वनिक संकेतों के संचरण को प्रभावित करता है।
समाधान: टच स्क्रीन को साफ करें, टच स्क्रीन के सभी तरफ ध्वनि तरंग प्रतिबिंब धारियों की सफाई पर विशेष ध्यान दें।सफाई करते समय, टच स्क्रीन कंट्रोल कार्ड की बिजली आपूर्ति काट दें।
19. शिक्षण पेंडेंट स्पर्श कोई प्रतिक्रिया नहीं
घटना: स्क्रीन को छूने पर माउस के तीर नहीं हिलते और स्थिति में कोई बदलाव नहीं होता।
कारण: इस घटना के कई कारण हैं, जो इस प्रकार हैं:
1. सतह ध्वनिक तरंग टच स्क्रीन के चारों ओर ध्वनिक प्रतिबिंब धारियों पर जमा हुई धूल या स्केल बहुत गंभीर है, जिससे टच स्क्रीन काम करने में विफल हो जाती है;
2. टच स्क्रीन की खराबी;
3. टच स्क्रीन नियंत्रण कार्ड ख़राब हो गया है;
4. टच स्क्रीन सिग्नल लाइन ख़राब हो गई है;
5. होस्ट के सीरियल पोर्ट में खराबी;
6. शिक्षण पेंडेंट का ऑपरेटिंग सिस्टम ख़राब हो गया है;
7. टच स्क्रीन ड्राइवर स्थापना त्रुटि।
समाधान: टच स्क्रीन सिग्नल इंडिकेटर लाइट का निरीक्षण करें, जो सामान्य परिस्थितियों में नियमित रूप से प्रति सेकंड लगभग एक बार चमकती है।
स्क्रीन को छूने पर शिक्षण पेंडेंट काला हो जाता है, जो एक जटिल समस्या है।यदि बैकलाइट ऊर्जा-बचत सेट है, तो काली स्क्रीन सामान्य है;यदि सिस्टम नियंत्रण क्षेत्र में दूसरा शब्द गलती से संचालित हो जाता है, तो स्क्रीन भी काली हो जाएगी।यदि पहले दो बिंदुओं को हटा दिया गया है, तो समीक्षा के लिए नवीनतम फ़र्मवेयर पर अपडेट करें।
अपनी जांच सीधे हमें भेजें

